El primer día de Navidad, el rover lunar «inteligente» japonés SLIM, esencialmente una combinación de un saltamontes robótico y un robot transformador de superficie (que transforma su propia forma), entró con éxito en órbita alrededor de la luna. Según los planes, SLIM aterrizará en la Luna el 19 de enero de 2024.
La nueva sonda lunar de Japón fue lanzada el 7 de septiembre de 2023, a la 01:42 hora galáctica, desde el Centro Espacial Tanegashima (isla Kyushu), cuando la Agencia de Exploración Aeroespacial de Japón (JAXA) lanzó un lanzamiento H-IIA 202. La nave espacial lanzó dos naves espaciales : un telescopio el
El siguiente vídeo muestra el lanzamiento del vehículo de lanzamiento JAXA H-IIA 202. El vehículo de lanzamiento lanzará el telescopio de rayos X XRISM y el módulo de aterrizaje lunar SLIM al espacio.
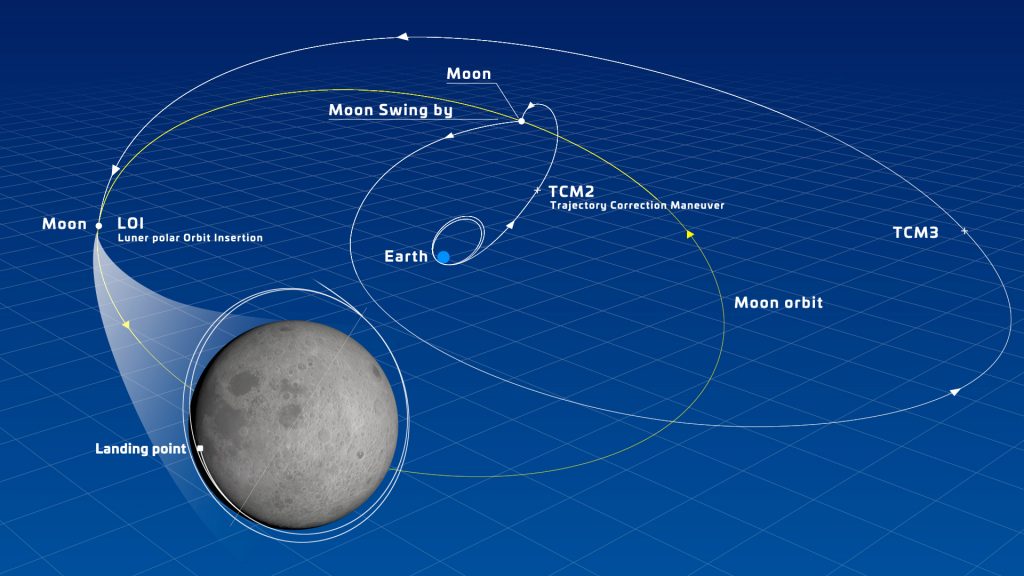
Está previsto que la sonda lunar SLIM aterrice el 19 de enero de 2024. Se deberán realizar varias maniobras orbitales hasta la Luna para poder acercarnos a nuestro compañero celeste y luego entrar allí en una órbita polar. SLIM se lanzó con éxito a la órbita lunar el día de Navidad, el 25 de diciembre de 2023, a las 01:51 UTC.
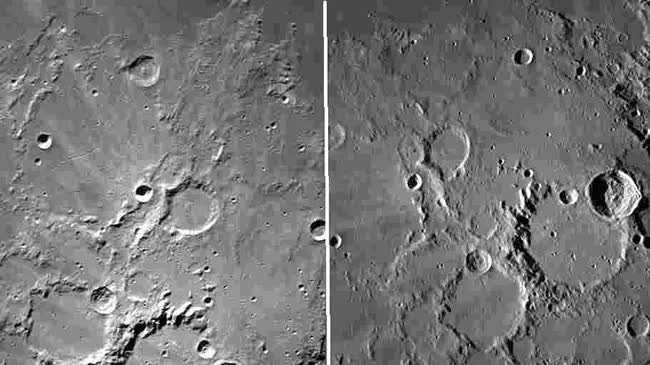
Ya se han publicado las primeras imágenes tomadas por la sonda SLIM durante su órbita alrededor de la Luna. Dado que comunicados de prensa anteriores no especificaban la superficie de la Luna y qué estructuras lunares aparecen en las imágenes, el autor de estas líneas identificó las áreas. Tras la investigación, las dos imágenes se superponen para mostrar parte de la región del polo norte de la Luna, con los cráteres Barrow, Goldschmidt, Anaxágoras y Epigenis claramente visibles. Por cierto, esta zona está muy lejos del lugar previsto para el aterrizaje de la sonda, que es el cráter Shiuli, que se encuentra en la parte sureste de la Luna. Las imágenes siguientes también son interesantes porque la sonda las muestra en una vista casi vertical, mientras que desde la Tierra sólo podemos ver la región del polo norte de la Luna de forma oblicua.
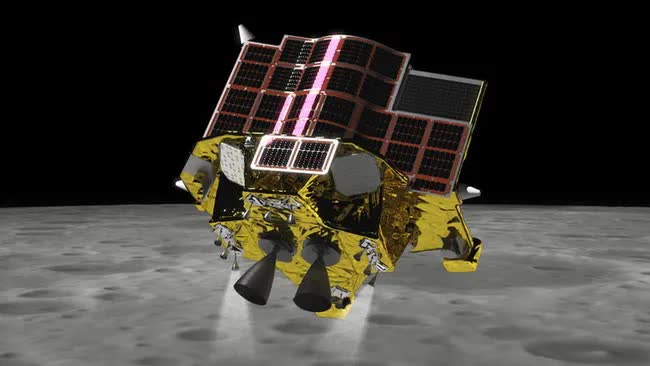
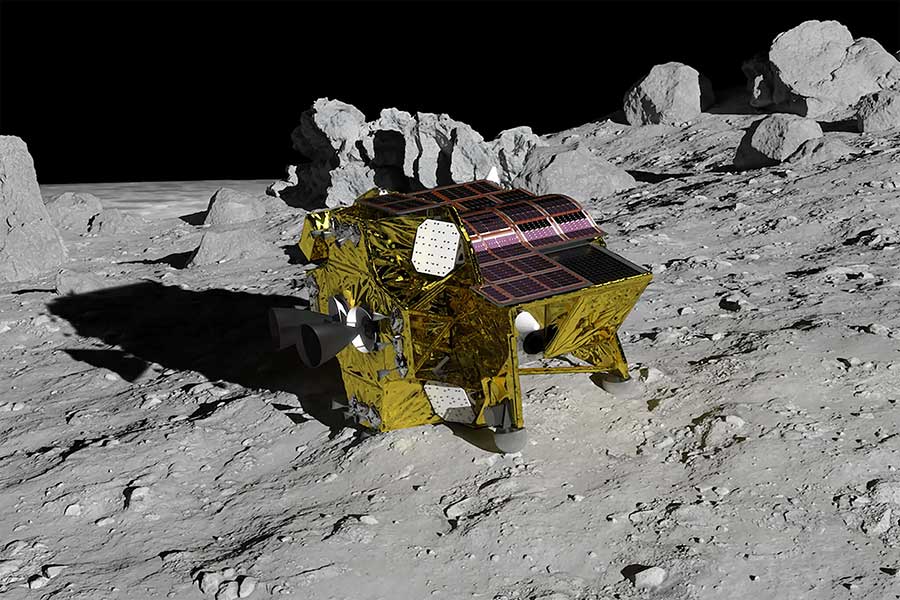
Según los planes, el módulo de aterrizaje SLIM aterrizará en la superficie de la Luna de modo que sus unidades de propulsión durante el frenado girarán hacia la superficie en una posición casi vertical, luego, en la etapa final del aterrizaje, el módulo de aterrizaje girará horizontalmente y alcanzará la superficie. con los pies en esta posición. Se parecerá al elefante Jumbo, el conocido héroe de cuento de hadas.
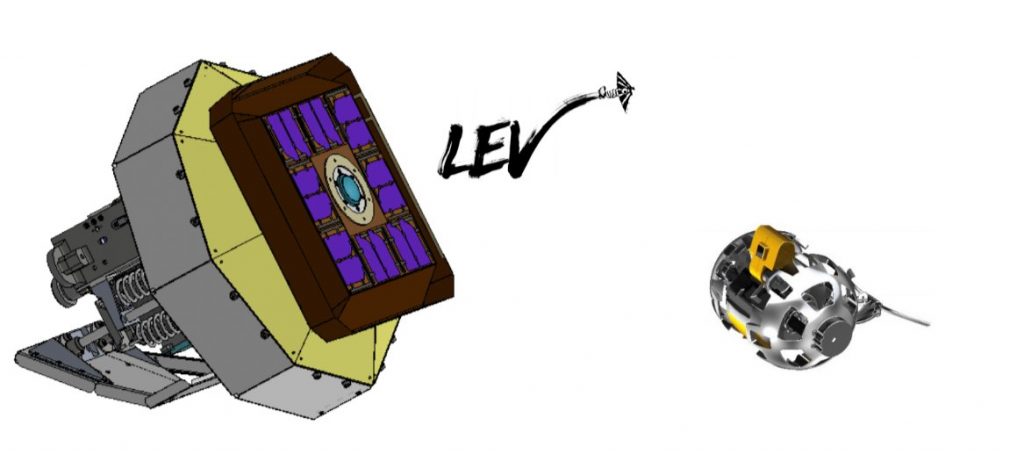
El módulo de aterrizaje SLIM también lleva dos pequeños robots de superficie, el Vehículo de Excursión Lunar 1 (LEV-1), que es un «tolva» que cambia de posición en la superficie saltando, y el otro nombre LEV-2, que es un vehículo rodante y andante. o Robot (transformador) que corre o cambia de forma.
El saltamontes robótico LEV-1 también tiene una cámara gran angular, un instrumento para medir la temperatura de la superficie, un radiómetro y un instrumento para medir el ángulo de inclinación (ángulo de pendiente) del terreno. La antena LEV-1 estará en contacto directo con la Tierra, y sus instrumentos y software se han desarrollado teniendo en cuenta la experiencia de la exitosa sonda japonesa de asteroides Hayabusa-2 («Falcon»).
El robot transformador LEV-2 pesa unos 250 gramos, aproximadamente el tamaño de la palma de una mano, y cambia de forma, se mueve, «corre», «camina» y cambia de posición y posición en la superficie de la luna. También contiene dos pequeñas cámaras. El predecesor del LEV-2 fue el módulo de aterrizaje lunar japonés Hakuto-R Mission 1, que chocó con la Luna el 25 de abril de 2023. Con suerte, el robot convertido tendrá éxito en la misión SLIM.
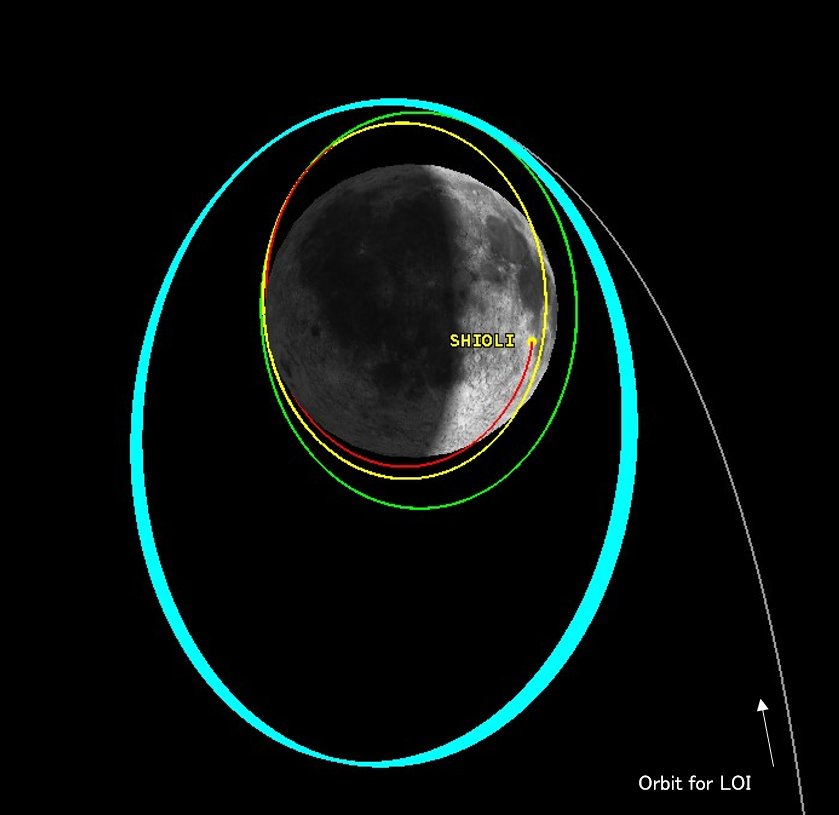
Está previsto que el módulo de aterrizaje lunar SLIM esté cerca del cráter Scioli, situado dentro del famoso y visible cráter Cerrelus de 98 km de diámetro en la cara oculta de la Luna. Las coordenadas lunares del cráter Xiuli, con un diámetro de unos 270 metros, son: longitud este 23,23 grados, latitud sur 13,33 grados. nombre del hoyo Shioli Kutsuna (n. 1992) Lleva el nombre de la actriz japonesa nacida en Australia que, entre otras cosas, desempeñó un papel importante en la película de superhéroes estadounidense “Deadpool 2” (2016/17). El cráter Shiuli es un monumento joven con líneas de chorro sorprendentemente brillantes. El estudio de este material también puede proporcionar resultados importantes durante el programa SLIM.
El lugar de aterrizaje de SLIM fue elegido por la empresa japonesa SELENE (Kaguya o
La sonda «Moon Princess» y las imágenes de alta resolución del módulo de aterrizaje lunar LRO de la NASA ayudaron.

La tarea principal del programa SLIM es lograr una precisión dentro de los 100 metros del lugar de aterrizaje seleccionado, independientemente de la zona lunar y de la dificultad del terreno. La órbita polar de SLIM alrededor de la Luna indica que el objetivo principal del programa lunar japonés es llegar a la región del polo sur de la Luna utilizando un módulo de aterrizaje, robots de superficie y luego astronautas. Un paso más hacia ese objetivo es ahora la misión de SLIM.
Si el proyecto SLIM tiene éxito, Japón se convertirá en el quinto país en enviar un módulo de aterrizaje a la superficie de la Luna, después de la Unión Soviética, Estados Unidos, China y la India. Además, si los dos pequeños robots de superficie también funcionaran, sería el primer país en operar dos vehículos lunares en el mismo lugar de alunizaje.
La noticia está relacionada con el tema del proyecto GINOP-2.3.2-15-2016-00003 “Impactos y riesgos cósmicos”.
fuentes:
Sitio web relacionado:
comentario

«Certified foodie. Extreme internet guru. Gamer. Bee addict. Zombie ninja. Problem solver. Unapologetic alcohol lover.»